







Downloadable Flight Data CSV
| Feature availability | | | | | |
|---|
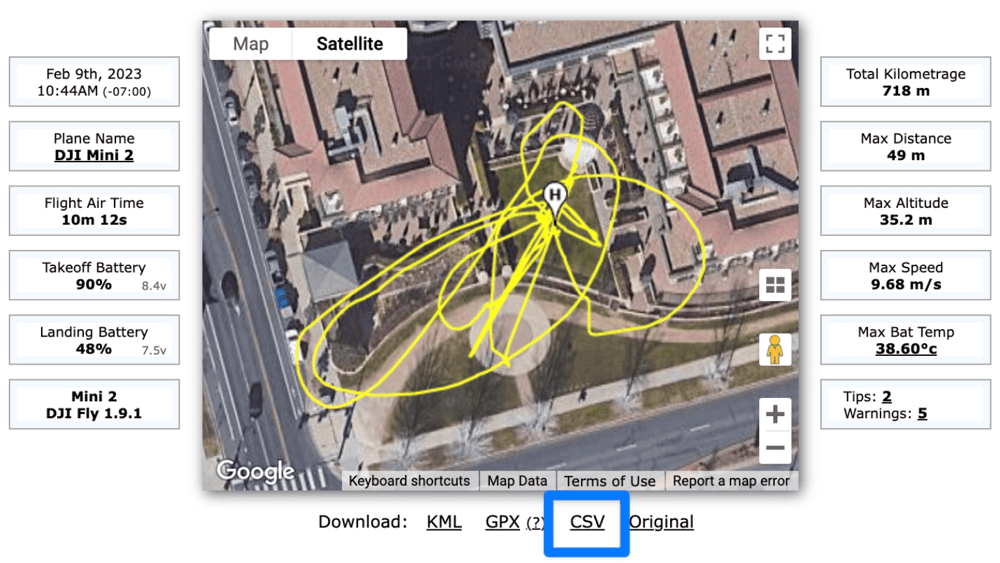
AirData users can download a CSV containing detailed flight data via the download links under the flight display map.
The table in this article lays out the definitions for the fields in this downloadable flight data CSV.
Where to download the CSV for your flight
CSV Flight Data Fields Definitions
Field | Definition |
time(millisecond) | Total time duration of flight |
datetime(utc) | Date and time of flight |
latitude | Latitude of aircraft |
longitude | Longitude of aircraft |
height_above_takeoff | Height above the ground elevation at point of takeoff |
height_above_ground_at_drone_location | Height at indicated time |
ground_elevation_at_drone_location | Ground elevation at indicated location |
altitude_above_seaLevel | Altitude above sea level at indicated time |
height_sonar | Height as measured by aircraft sonar (typically cuts off above 20-30 meters) |
speed | Speed of aircraft |
distance | Straight line distance from starting location of flight |
mileage | Total distance traveled at currently indicated time |
satellites | Total number of GPS satellites currently in contact with the aircraft |
gpslevel | GPS signal strength (measured from 0-5, 0 being lowest and 5 being strongest) |
voltage(v) | Voltage of battery |
max_altitude | Maximum height reached |
max_ascent | Maximum distance climbed vertically |
max_speed | Maximum speed reached |
max_distance | Maximum distance traveled horizontally |
xSpeed | Speed along x-axis (East/West, longitudinal axis) |
ySpeed | Speed along y-axis (North/South, latitudinal axis) |
zSpeed | Speed along z-axis (Up/Down, normal axis) |
compass_heading(degrees) | Compass direction of aircraft in degrees |
pitch(degrees) | Aircraft pitch (rotation around y-axis) in degrees |
roll(degrees) | Aircraft roll (rotation around x-axis) in degrees |
isPhoto | Indicates whether Photo was taken. 1 means yes. 0 means no. |
isVideo | Indicates whether Video was being taken. 1 means yes. 0 means no. |
rc_elevator | Controller pitch (forward/backward) input level (364 to 1684) |
rc_aileron | Controller aileron (roll) input level (364 to 1684) |
rc_throttle | Controller throttle (upward/downward movement along z-axis) input (364 to 1684) |
rc_rudder | Controller rudder (yaw) input (364 to 1684) |
rc_elevator(percent) | Controller pitch (forward/backward) input percentage (-100% to 100%) |
rc_aileron(percent) | Controller aileron (roll) input percentage (-100% to 100%) |
rc_throttle(percent) | Controller throttle (upward/downward movement along z-axis) input percentage (-100% to 100%) |
rc_rudder(percent) | Controller compass direction change (yaw) input percentage (-100% to 100%) |
gimbal_heading(degrees) | Direction gimbal is pointing |
gimbal_pitch(degrees) | Pitch (up/down tilt) of gimbal |
battery_percent | Battery charge percent |
voltageCell1 | Voltage of battery cell 1 |
voltageCell2 | Voltage of battery cell 2 |
voltageCell3 | Voltage of battery cell 3 |
voltageCell4 | Voltage of battery cell 4 |
voltageCell5 | Voltage of battery cell 5 |
voltageCell6 | Voltage of battery cell 6 |
current(A) | Level of current being used by aircraft |
battery_temperature | Battery temperature |
altitude | Altitude. Duplicate of altitude_above_seaLevel (for Flytrex compatibility). |
ascent | Height climbed. Duplicate of max_ascent (for Flytrex compatibility). |
flycStateRaw | Integer representing flight mode/state of aircraft |
flycState | Flight mode/state of aircraft |
message | Notifications generated by flight app |
Notes
Most of these fields are derived from the flight telemetry data provided by the flight log.
The exceptions are: 1) "ground_elevation_at_drone_location", which is derived from a database of satellite-measured ground elevation, and
2) "height_above_ground_at_drone_location", which is derived by subtracting "ground_elevation_at_drone_location" from the altitude as reported by the drone.
| Comment Section | Sort by:
|




Please login to add a comment
Thank you for writing with this question.
Currently, there is no option to download individual flight logs as CSV files in bulk. However, with our Standard Flight Reports, you can export data from multiple flight logs in CSV format.
Please note that these reports provide a summary of the data contained in the flight logs rather than the full flight log files themselves. You can learn more about the information that can be obtained with this feature on our Standard Flight Reports help article: app.airdata.com
Standard Flight Reports are available with our HD 360 PRO and Enterprise subscriptions. To learn more about the features included with each subscription tier, please visit our pricing page: airdata.com
If you have any further questions, please reach out to our dedicated support team at [email protected].
Thank you for your time.
Kind regards,
Teresa
AirData Support